Optimus Ride, a self-driving vehicle technology startup that spun out of MIT in 2015, today launched its driverless shuttle service inside a geo-fenced area at the Brooklyn Navy Yard. The 300-acre shipyard and industrial complex has more than 400 manufacturing businesses and 10,000 employees onsite.
Six Optimus Ride driverless shuttles are now transporting passengers inside a 1-mile area between the NYC Ferry stop at Dock 72 and the Yard’s Cumberland Gate at Flushing Avenue. This area acts as a connection point for thousands of daily commuters. Optimus Ride said the service, which is free and runs seven days a week, is expected to transport some 500 passengers daily.
“Launching our self-driving vehicle system in New York at the Brooklyn Navy Yard is yet another validation that not only is Optimus Ride’s system a safe, efficient means of transportation, but also that autonomous vehicles can solve real-world problems in structured environments – today,” said Dr. Ryan Chin, CEO and co-founder of Optimus Ride. “In addition, our system will provide access to and experience with autonomy for thousands of people, helping to increase acceptance and confidence of this new technology, which helps move the overall industry forward.”
Initially, Optimus Ride said there will be a safety driver and software operator in the vehicle while in operation. Eventually those safety operators will be removed, the company said, and engineers at its Boston office will remotely monitor the shuttles. Chin said the shuttles are programmed to drive between 10-15 miles per hour, which adheres to Navy Yard speed limits.
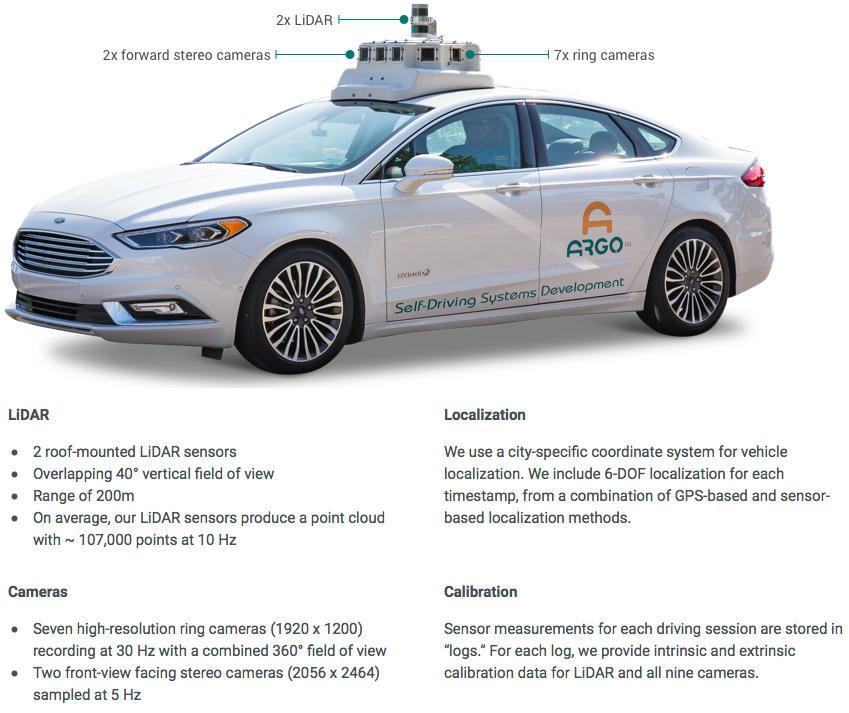
Optimus Ride raffled off autonomous shuttle rides at the Robotics Summit & Expo 2019, which is produced by The Robot Report. Its all-electric shuttles move at slow speeds, maxing out at 25 MPH, and include three LIDAR sensors (two in the front, one in back) and eight cameras.

Aerial view of the Brooklyn Navy Yard, which now has an autonomous shuttle service from Optimus Ride. | Credit: Optimus Ride
According to the New York Post, demand was initially slow for the driverless shuttle service today. But those passengers who did ride were happy with the service. According to the New York Post:
“One user, 46-year-old Carey Booth who commutes by ferry from her home in Astoria to her job at the Brooklyn Navy Yard every day, took a ride in the shuttle while on her way to work.
“The ride was extremely smooth, smoother than the Navy Yard buses,” Booth said. “The car adjusted really well on turns and when other cars were driving nearby. It seems like they’ve tested it really extensively.”
Booth said that she’d “love” to see the fleet expand its coverage.
“I’d be cool with these cars being outside the yard at some point. I’d definitely love to see them all over the yard first though, because right now it’s just from point A to point B,” Booth said, adding that “I trust these cars more than I trust the drivers out on the streets.”
Carlos de Jesus, 38, gave the shuttle a spin before he headed to his volunteer job in Greenpoint.
“This was my first time ever in a self-driven vehicle. If no one had told me, I wouldn’t have known it was self-driven,” said de Jesus, who lives nearby. “Breaking and turning might be a little quicker than you’re used to, but everything was fine.”
De Jesus called it a “smooth ride.”

Optimus Ride’s autonomous shuttle operating in the Union Point development in South Weymouth, MA. | Credit: Optimus Ride
Optimus Ride testing in other states
Optimus Ride is testing its Level 4 shuttles in other states as well. In California, Optimus Ride is heading to Paradise Valley Estates, a gated community in Fairfield, California. There it will provide self-driving tours to prospective residents and a shuttle service to residents to other locations within the property. This is expected to start in Q2 2019.
In June 2019, Optimus Ride began providing tenants at Brookfield Properties’ Halley Rise, a new $1.4 billion mixed-use development in Reston, Virginia, with a autonomous shuttle service to locations within the property. And for the two-plus years, the company has been testing in two Massachusetts locations: in Boston’s Seaport District and South Weymouth. The company says its shuttles have completed over 20,000 trips since 2015.
Optimus Ride raised an $18 million Series A round in November 2017 that was led by Greycroft Partners. Other participating investors included Emerson Collective, Fraser McCombs Capital, and MIT Media Lab director Joi Ito. Then in April 2019 it raised another $20.7 million in a prospective $60 million round.
Other companies working on autonomous vehicles that operate in geo-fenced areas include May Mobility, Navya, Perrone Robotics and Voyage. May Mobility, which raised $22 million in February 2019, is testing its shuttles across the US, while Voyage is targeting retirement communities. Navya, however, recently changed its strategic direction. Instead of deploying its own autonomous shuttles, Navya is now licensing its technology to third-party companies.
The post Optimus Ride driverless shuttles launch in Brooklyn Navy Yard appeared first on The Robot Report.








 Keynotes
Keynotes