PneuConnect with GRT gripper on a UR cobot. Source: PHD
PHD Inc. this month added three products to its line of grippers and accessories for industrial automation. They are intended to help robots grip large objects, make positioning and programming easy for maximum efficiency, and facilitate machine tending. PHD’s products are designed to work with collaborative robot arms, or cobots, from Universal Robots A/S.
Fort Wayne, In.-based PHD said it sells grippers, linear slides, and the widest range of long-life, robust actuators in the industry. It also offers engineering software and Internet-based tools to save design time, support from factory-trained application and industry specialists, and rapid product delivery.
PHD adds jaw-travel option to GRR line
The company has added a 300mm (11.81 in.) jaw-travel model of its Series GRR high-capacity pneumatic grippers. These parallel grippers are designed to provide high grip force, five long-jaw travels, and high loads.
Because the Guardian grippers can withstand high impact and shock loads, they are suitable for applications such as small engine block manufacturing, automotive wheel-rim manufacturing, and foundry applications, said PHD.
Also available is the Series EGRR high-capacity electric parallel grippers, which offer many of the same benefits as the pneumatic design.
Pneu-Connect X2 with dual grippers available
PHD also announced the release of Pneu-Connext X2 kits with dual grippers. They can be mounted to UR cobots for maximum efficiency in automation performance.
The Pneu-Connect X2 includes PHD’s Freedrive feature, which interfaces with UR cobots for easy positioning and programming. The kits come in the following standard combinations:
- Two Series GRT parallel pneumatic three-jaw grippers
- Two Series GRH parallel long-travel pneumatic grippers with analog sensors
- One Series GRT gipper and one Series GRH gripper with analog sensors
Contact PHD for other gripper combinations.
The Pneu-Connect® X2 includes the following features, said PHD:
- Five popular PHD pneumatic gripper options for a wide variety of applications
- Two grippers for maximum automation efficiency
- Series GRH Grippers now offer analog sensors providing jaw position feedback throughout jaw travel
- The Freedrive feature that interfaces with the UR for easy positioning and programming
- Seamless, cost-effective, end-effector integration
- Incorporated MAC valves and control board
- Common jaw mounting for application specific tooling
- Updated URCap software included for intuitive, easy setup
- Ease of use
Download the Pneu-Connect catalog for more information.
Transition plates connect UR directly to linear actuator
PHD’s transition plate allows a Universal Robot arm to be directly attached to the new PHD Series ESU electric belt-driven linear actuator. The company said it offers a transition plate for each size of UR arm, “taking machine tending to a whole new level.”
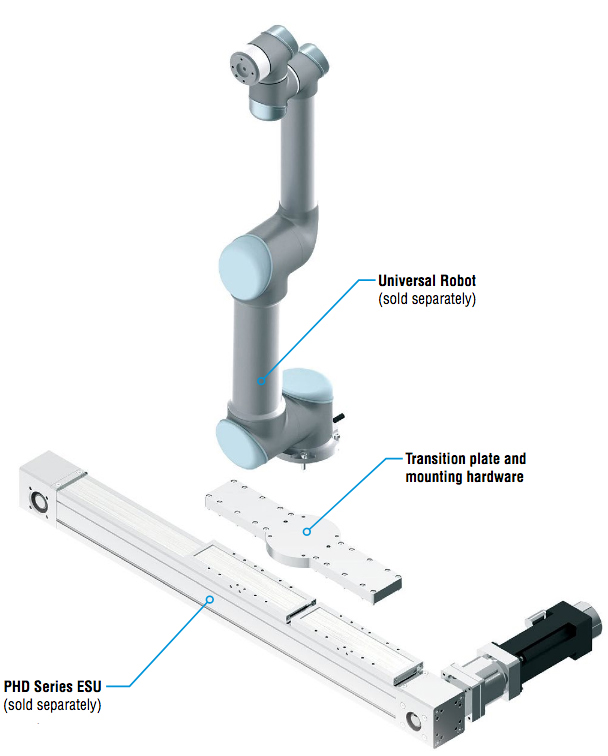
This transition plate provides a seventh axis for UR arms with the ESU linear actuator. Source: PHD
With a cataloged stroke of up to 5500mm (216.53 in.), users can increase the working area of a UR10 arm by 10 times.
The post PHD adds gripper options, transition plate to product line appeared first on The Robot Report.
 Keynotes
Keynotes