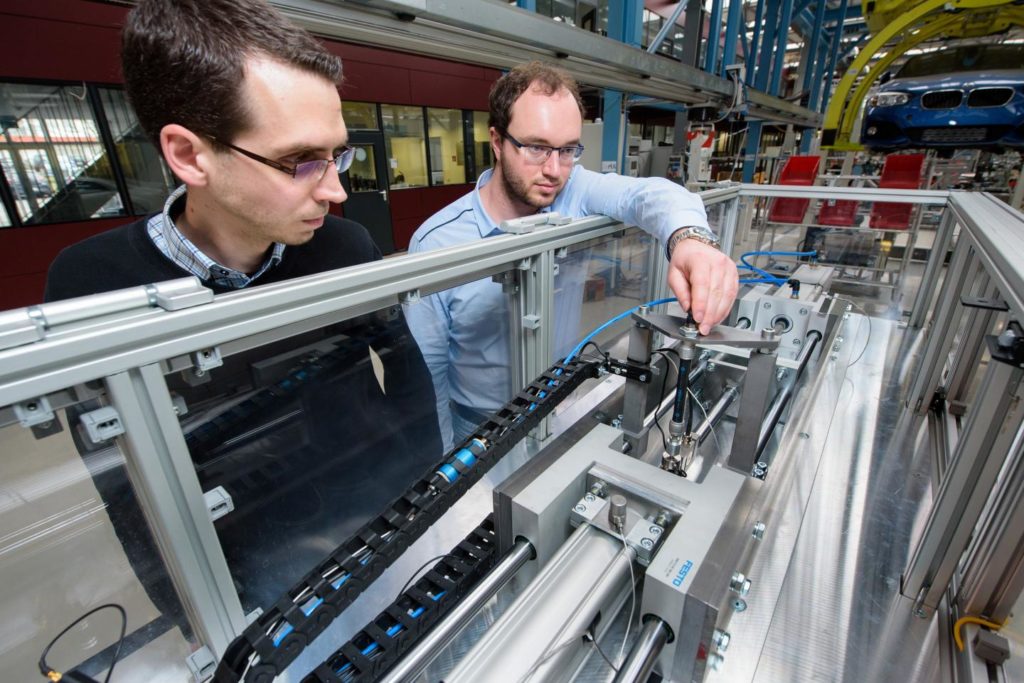
VOICE member Ian Fairclough and study lead Dr. Shuo Li in test of older drivers. Source: Newcastle University
With more people living longer, driving is becoming increasingly important in later life, helping older drivers to stay independent, socially connected and mobile.
But driving is also one of the biggest challenges facing older people. Age-related problems with eyesight, motor skills, reflexes, and cognitive ability increase the risk of an accident or collision and the increased frailty of older drivers mean they are more likely to be seriously injured or killed as a result.
“In the U.K., older drivers are tending to drive more often and over longer distances, but as the task of driving becomes more demanding we see them adjust their driving to avoid difficult situations,” explained Dr Shuo Li, an expert in intelligent transport systems at Newcastle University.
“Not driving in bad weather when visibility is poor, avoiding unfamiliar cities or routes and even planning journeys that avoid right-hand turns are some of the strategies we’ve seen older drivers take to minimize risk. But this can be quite limiting for people.”
Potential game-changer
Self-driving cars are seen as a potential game-changer for this age group, Li noted. Fully automated, they are unlikely to require a license and could negotiate bad weather and unfamiliar cities under all situations without input from the driver.
But it’s not as clear-cut as it seems, said Li.
“There are several levels of automation, ranging from zero where the driver has complete control, through to Level 5, where the car is in charge,” he explained. “We’re some way-off Level 5, but Level 3 may be a trend just around the corner. This will allow the driver to be completely disengaged — they can sit back and watch a film, eat, even talk on the phone.”
“But, unlike level four or five, there are still some situations where the car would ask the driver to take back control and at that point, they need to be switched on and back in driving mode within a few seconds,” he added. “For younger people that switch between tasks is quite easy, but as we age, it becomes increasingly more difficult and this is further complicated if the conditions on the road are poor.”
Newcastle University DriveLAB tests older drivers
Led by Newcastle University’s Professor Phil Blythe and Dr Li, the Newcastle University team have been researching the time it takes for older drivers to take back control of an automated car in different scenarios and also the quality of their driving in these different situations.
Using the University’s state-of-the-art DriveLAB simulator, 76 volunteers were divided into two different age groups (20-35 and 60-81).
They experienced automated driving for a short period and were then asked to “take back” control of a highly automated car and avoid a stationary vehicle on a motorway, a city road, and in bad weather conditions when visibility was poor.
The starting point in all situations was “total disengagement” — turned away from the steering wheel, feet out of the foot well, reading aloud from an iPad.
The time taken to regain control of the vehicle was measured at three points; when the driver was back in the correct position (reaction time), “active input” such as braking and taking the steering wheel (take-over time), and finally the point at which they registered the obstruction and indicated to move out and avoid it (indicator time).
“In clear conditions, the quality of driving was good but the reaction time of our older volunteers was significantly slower than the younger drivers,” said Li. “Even taking into account the fact that the older volunteers in this study were a really active group, it took about 8.3 seconds for them to negotiate the obstacle compared to around 7 seconds for the younger age group. At 60mph, that means our older drivers would have needed an extra 35m warning distance — that’s equivalent to the length of 10 cars.
“But we also found older drivers tended to exhibit worse takeover quality in terms of operating the steering wheel, the accelerator and the brake, increasing the risk of an accident,” he said.
In bad weather, the team saw the younger drivers slow down more, bringing their reaction times more in line with the older drivers, while driving quality dropped across both age groups.
In the city scenario, this resulted in 20 collisions and critical encounters among the older participants compared to 12 among the younger drivers.

VOICE member Pat Wilkinson. Source: Newcastle University
Designing automated cars of the future
The research team also explored older drivers’ opinions and requirements towards the design of automated vehicles after gaining first-hand experience with the technologies on the driving simulator.
Older drivers were generally positive towards automated vehicles but said they would want to retain some level of control over their automated cars. They also felt they required regular updates from the car, similar to a SatNav, so the driver has an awareness of what’s happening on the road and where they are even when they are busy with another activity.
The research team are now looking at how the vehicles can be improved to overcome some of these problems and better support older drivers when the automated cars hit our roads.
“I believe it is critical that we understand how new technology can support the mobility of older people and, more importantly, that new transport systems are designed to be age friendly and accessible,” said Newcastle University Prof. Phil Blythe, who led the study and is chief scientific advisor for the U.K. Department for Transport. “The research here on older people and the use of automated vehicles is only one of many questions we need to address regarding older people and mobility.”
“Two pillars of the Government’s Industrial strategy are the Future of Mobility Grand Challenge and the Ageing Society Grand Challenge,” he added. “Newcastle University is at the forefront of ensuring that these challenges are fused together to ensure we shape future mobility systems for the older traveller, who will be expecting to travel well into their eighties and nineties.”
“It is critical that we understand how new technology can support the mobility of older people and, more importantly, that new transport systems are designed to be age friendly and accessible,” — Newcastle University Prof. Phil Blythe
Case studies of older drivers
Pat Wilkinson, who lives in Rowland’s Gill, County Durham, has been supporting the DriveLAB research for almost nine years.
Now 74, the former Magistrate said it’s interesting to see how technology is changing and gradually taking the control – and responsibility – away from the driver.
“I’m not really a fan of the cars you don’t have to drive,” she said. “As we get older, our reactions slow, but I think for the young ones, chatting on their phones or looking at the iPad, you just couldn’t react quickly if you needed to either. I think it’s an accident waiting to happen, whatever age you are.”
“And I enjoy driving – I think I’d miss that,” Wilkinson said. “I’ve driven since I first passed my test in my 20s, and I hope I can keep on doing so for a long time.
“I don’t think fully driverless cars will become the norm, but I do think the technology will take over more,” she said. “I think studies like this that help to make it as safe as possible are really important.”
Ian Fairclough, 77 from Gateshead, added: “When you’re older and the body starts to give up on you, a car means you can still have adventures and keep yourself active.”
“I passed my test at 22 and was in the army for 25 years, driving all sorts of vehicles in all terrains and climates,” he recalled. “Now I avoid bad weather, early mornings when the roads are busy and late at night when it’s dark, so it was really interesting to take part in this study and see how the technology is developing and what cars might be like a few years from now.”
Fairclough took part in two of the studies in the VR simulator and said it was difficult to switch your attention quickly from one task to another.
“It feels very strange to be a passenger one minute and the driver the next,” he said. “But I do like my Toyota Yaris. It’s simple, clear and practical. I think perhaps you can have too many buttons.”
Wilkinson and Fairclough became involved in the project through VOICE, a group of volunteers working together with researchers and businesses to identify the needs of older people and develop solutions for a healthier, longer life.







 Related:
Related: